加速度センサーの原理
■別のページに、マイクロビットにジャンケンをさせるプログラムの制作記事を掲載してある。これは、基板が揺れたらジャンケンの手を表示し、勝敗を判断するものであった。このプログラムを作る工程の第1段階として、基板の揺れを検出するプログラムつくり、その動作の様子を記録してあるので、ここであらためて見てみよう!
■この実験動画から、「揺れの検出」のできることが確認される。ここで検出される「揺れ」とは、基板を大きく動かすことでも無く、早く動かすことでも無く、基板の動く速さの急な変化となっていることを体験した。
■物の「速さの時間的な変化の割合」は、加速度と呼ばれ、その量を測定するものを「加速度センサー(*1)」と呼ぶ。このページでは加速度センサーというものの様子を少し見てみよう。

■マイクロビット基板の加速度センサーには、NXPセミコンダクターズ社のMMA8653が採用されている。この基板上のコンピューターIC(*2)とは一対のシリアルデーター線(*3)で結ばれていて、コンピューターからの問い合わせに応じて、加速度の値を回答している。
───
(*1)センサー:sensor 物理量を電気量へ変換するもので、検出器と訳す。
(*2)IC : integrated circuit の頭文字で、集積回路と訳す。
(*3)シリアルデーター線:データーの交信をウエートごとに配線するパラレル型のものと、すべてのウエートを単一の信号線に順次のせるシリアル型のものとに大別できる。このセンサーはシリアル型の交信のできるインテリジェントなものだぞといったところである。
───
■MMA8653のデーターシート(=一般ユーザー向けに簡単に製品仕様をとりまとめた書類)にはその概要として、下記のように記述されている。
- The MMA8653FC is an intelligent, low-power, three-axis, capacitive micromachined accelerometer with 10 bits of resolution.
機能、仕様、原理を端的に表記してある。(約例:MMA8653FCは、10bit分解能の信号処理機能付きの低消費電力、マイクロマシン加工の静電容量型加速度計である)
■形状は、次のように記述されている。
- 10-pin DFN 2 mm x 2 mm x 1 mm
その外寸の他、端子数=10、2列、平板、プラスチックパッケージ、といったことが端的にわかる表記である。
■このICの概要を知ろうとするとき、ブロック図(block diagram)を見るといい。これは、ちょうど、MakeCodeで記述するプログラムと類似するものである。信号処理のあらましが見て取れる。
各ブロックは、それぞれその機能をはたすために、さらに物理層に向かって、言語的あるいは回路図的に詳細設計に連なっていくものである。最終的にはシリコンウエハー上のパターン設計に行き、さらに、その形状の定義、どこを彫り、どこを積み上げ、なにを染み込ませるかといった製造プロセスの構築に至る。
ブロック図では、一般に、メインの信号が左から右へ向かって加工や処理が進んでいくように描かれている。従って、外部からの入力信号がある場合は、左手にその端子が描かれ、出力端子が右手に描かれる。上下からの出入りがあるとすれば、制御信号や電力信号である。あるいは、ものによってはフィードバック信号のあるものもある。
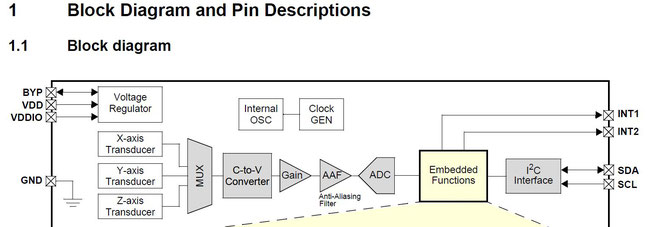
■このようなICの概要を知る上で、もうひとつ、この下に掲載するような信号の一覧表も有用である。どのような信号を与えて、どのような信号が得られるものかということから、このICの機能というものが類推できる。ただし、これは加速度センサーということなので、主要な入力は、物理的な加速度である。その他の入力として、センサーとして作動させる上で必要な電力と制御信号がある。出力は、X軸、Y軸、Z軸の3軸分の加速度の数値、ならびに、コンピューターとの協調に必要な制御用の信号である。
▼MMA8653 信号一覧表 cf(1)
| Pin # | Pin Name | Description |
| 1 | VDD | Power supply |
| 2 | SCL | I2C Serial Clock |
| 3 | INT1 | Interrupt 1 output |
| 4 | BYP | Internal regulator output capacitor connection |
| 5 | INT2 | Interrupt 2 output |
| 6 | GND | Ground |
| 7 | GND | Ground |
| 8 | VDDIO | Digital Interface Power supply |
| 9 | GND | Ground |
| 10 | SDA | I2C Serial Data |
■これらの情報をもとに、この加速度センサーの概要を考えてみよう。まずブロック図の左端に3軸分のtransducer(=変換器)がある。これは、このICに印加される加速度を電気信号へ変換するものである。データーシートにcapacitive micromachined accelerometerと記述されていることから、次のような検出の原理が想起される。
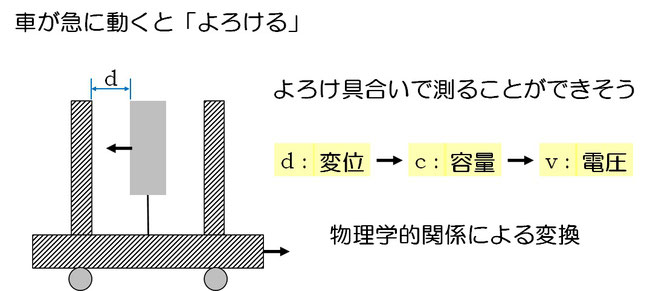
■この図のような台車が急に動いたとすると、中央の物体が慣性の原理によって、壁に近づく。このような物体の位置の変化を変位と呼ぶ。電極間距離が小さくなると静電容量が増大する。このような仕組みをシリコンウェハー表面に微小な機構として形成できるように計画したものが下の図である。(この部品ではない)
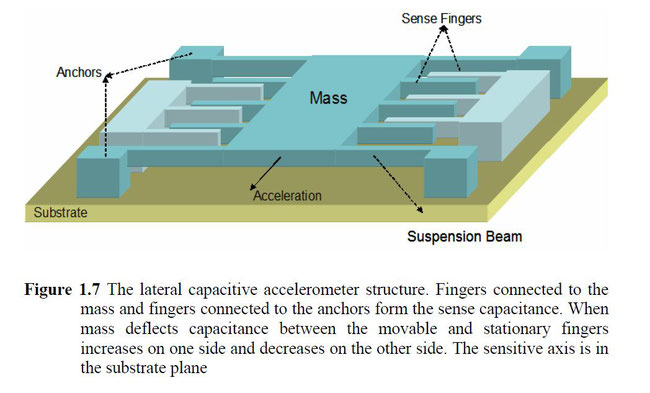
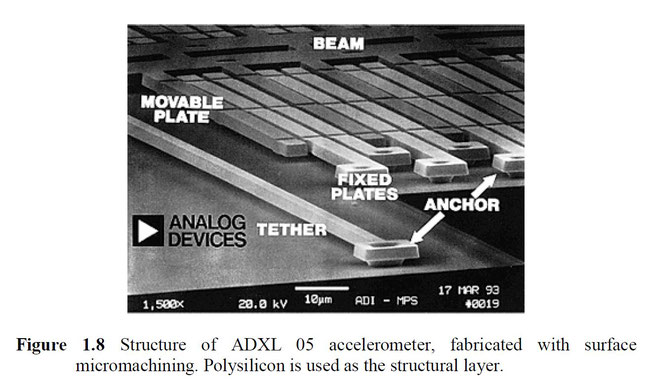
■下の図は、上記と同じような仕組みをシリコンウエハー上に形成したものの電子顕微鏡写真である。(この部品ではない)
■MMA8653のブロック図に戻ると、そこに描かれているtransduser(=変換器)も、これと同等な仕組みと考えられる。そして、これが、X軸、Y軸、Z軸の3軸分、作り込まれている。
その次にあるブロックMUXは、multiplexerといい、三軸を次にある容量電圧変換部へ順次接続するものである。
その後、増幅し、帯域制限したうえ、アナログ-デジタル変換して、三軸分の加速度を数値として得る。
そして、これらのデーターを処理して、コンピューターからの加速度データーの要求に応じて所定の形式と順序で送り出す。

■コンピューターは、三軸分の加速度センサーの大きさ、変化率、三軸加速度の大小関係から基板の姿勢、動きに関連付けて、加速度センサーを取り扱う関数で検出する11通りの結果を出力するようにプログラムされていると考えられる。

(1)Freescale Semiconductor MMA8653FC, 03/2015
(2)REFET FIRAT YAZICIOĞLU "SURFACE MICROMACHINED CAPACITIVE ACCELEROMETERS USING MEMS TECHNOLOGY" AUGUST 2003, THE GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCES OF THE MIDDLE EAST TECHNICAL UNIVERSITY.